LEVA shows what AI logistics robots look like when they can pick up and carry cargo—not just navigate. Learn where walk-and-roll robots fit in 2026 ops.
Cargo Robots That Walk and Roll: The LEVA Model
A useful number to keep in your head for logistics automation is 85 kg (187 lb). That’s roughly the weight of a packed Euro container full of parts, supplies, or returns—heavy enough that “just have someone carry it” stops being a reasonable default.
That’s why the LEVA prototype out of Zurich is interesting. Not because it’s another sidewalk robot that can follow a route, but because it tackles the part most delivery and warehouse robots quietly avoid: autonomous pickup and drop-off. Routing is hard. Handling is harder. Doing both, on curbs and stairs, is where AI-enabled robotics starts paying real operational dividends.
This post is part of our AI in Robotics & Automation series, where we focus on practical systems that reduce manual work without turning your facility (or your city block) into a science project. LEVA is a strong example of what the next wave of autonomous logistics robots is really about: mobility + manipulation + decision-making in messy environments.
The real bottleneck: “autonomous” robots that still need humans
Most companies get this wrong: they evaluate delivery robots on navigation demos and forget the handoff.
In many deployments, ground robots can move from A to B reliably—but a human still has to:
- stage the cargo at the right height
- load the robot
- unload it at the destination
- fix exceptions (blocked access, curb, stairs, misplaced bin)
That last meter of work is the hidden cost. If your robot needs a person at both ends, you haven’t removed labor—you’ve rearranged it.
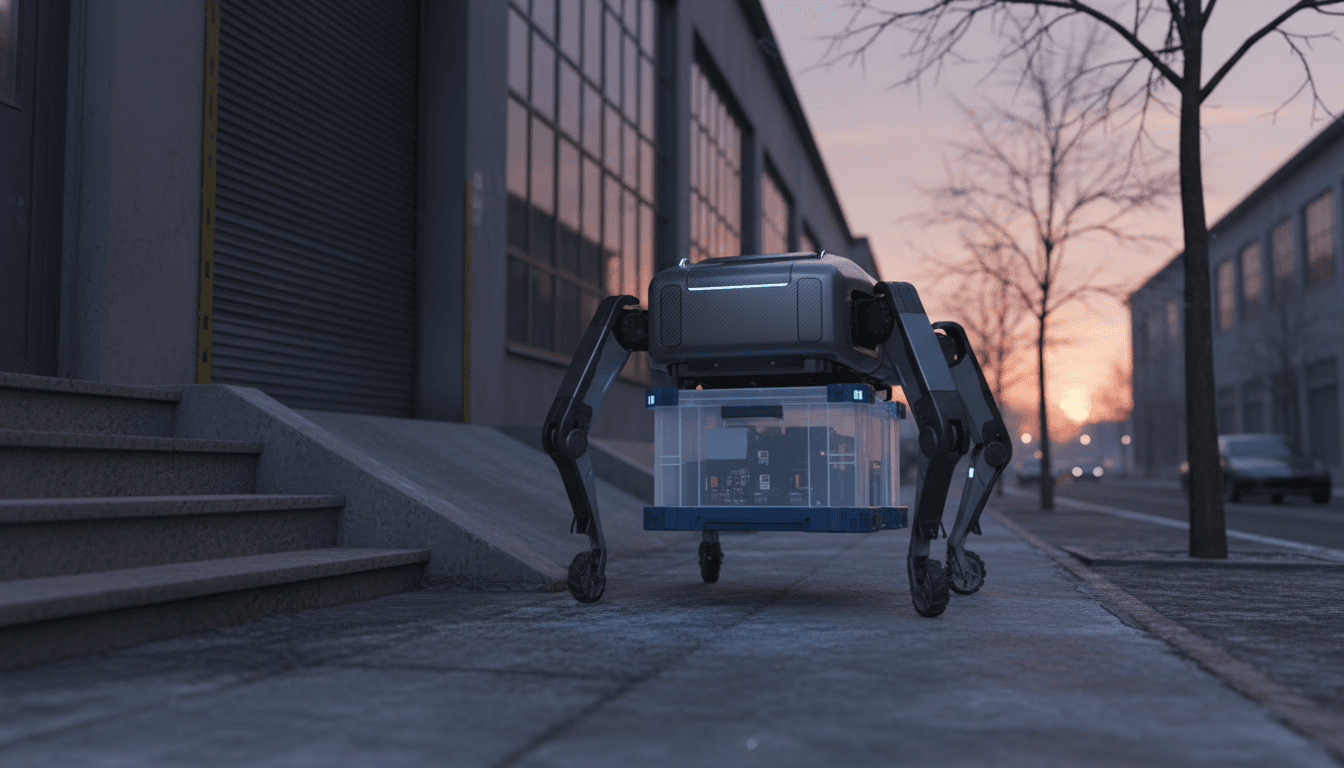
LEVA’s headline capability is simple and blunt: it can spot a standardized cargo box, position itself, latch onto it, lift it, and carry it—without a person touching the box. The prototype targets Euro-type containers and lifts up to 85 kg, which is notable because that’s not “light parcel delivery.” That’s “real goods.”
Why legs + wheels is the right compromise for logistics robots
Answer first: Wheels win on efficiency, legs win on access. Combining them is how you make a robot that can actually operate across a whole route instead of a carefully curated corridor.
Rolling mode: speed and battery life
LEVA uses wheels at the end of each leg. On smooth surfaces (sidewalks, warehouse floors, loading bays), it moves like a wheeled robot—typically the most energy-efficient way to travel. You get:
- higher travel speed than walking gaits
- lower energy consumption per meter
- simpler control for long straight runs
This is the unglamorous truth of robotics: most working robots spend most of their time just moving. Saving energy on motion is what extends uptime and reduces charging infrastructure.
Walking mode: curbs, stairs, and “uncooperative” terrain
When the route includes curbs, stairs, thresholds, or broken pavement, wheels alone become brittle. LEVA can lock its wheels and move like a quadruped to step up or over obstacles.
That matters because real logistics environments aren’t just warehouses. They’re:
- hospital corridors with ramps and thresholds
- campuses with mixed paving
- service entrances with steps
- older buildings with inconsistent access
A robot that can’t handle a curb isn’t “almost ready.” It’s not deployable.
Omnidirectional movement: why independent steering changes operations
Each wheel is independently powered and steerable, letting the robot translate sideways. Operationally, that enables:
- tighter positioning over cargo
- less time spent on multi-point turning
- fewer “can’t reach it” exceptions in cluttered staging areas
In automation, shaving seconds off every pickup matters. But reducing exceptions matters more.
The AI stack under the hood: navigation is the easy part now
Answer first: LEVA’s autonomy is a sensor-fusion problem plus robust decision logic. The sensors are familiar—what’s changing is how reliably robots can interpret and act on them.
LEVA navigates using a combination of GPS, LiDAR, and cameras. That combination signals a practical design philosophy:
- GPS supports global positioning outdoors (with the usual urban caveats)
- LiDAR provides geometry for obstacle detection and local mapping
- Cameras add semantic understanding (what is the object?) and help with close-range alignment
Where AI earns its keep is in the “boring” moments:
- deciding whether an obstacle is passable
- choosing when to roll vs. walk
- aligning precisely over a container
- detecting whether the container is properly latched
- handling partial occlusion or inconsistent lighting
You can think of this as a three-layer autonomy model:
- Perception (AI + geometry): detect containers, curbs, stairs, pedestrians
- Planning (optimization): pick safe paths and stable body configurations
- Control (real-time): execute rolling/walking transitions without tipping or dragging cargo
A snippet-worthy way to say it:
Autonomy isn’t a route-following feature; it’s an exception-handling system.
The pickup mechanism is the product, not the gimmick
Answer first: Autonomous cargo handling is what turns a delivery robot into a logistics worker.
LEVA uses five onboard cameras (one on each vertical side and one underneath) to help it locate and align over a box. Once positioned, it lowers its body by bending its legs, and powered hooks latch onto the top of the container, securing it beneath the chassis.
That “underbody carry” approach is smart for a few reasons:
- Stability: the load stays close to the robot’s center of mass
- Clearance control: adjustable ride height (reported range roughly 0.6 m to 0.9 m) lets it manage obstacles
- Protection: the cargo is less exposed than if it were perched on top
The published dimensions (about 1.2 m long and 0.75 m wide) also hint at the intended operating envelope: this is sized for sidewalks, service corridors, and industrial walkways.
One more detail that shouldn’t be missed: the robot’s weight is about equal to its lifting capacity (85 kg). In plain terms, that’s the kind of ratio you’d expect from a machine built for real handling, not a marketing demo.
Where this kind of robot actually works in 2026: high-value, repeatable routes
Answer first: The best near-term use cases are closed or semi-controlled environments where the handoff is standardized.
You’re unlikely to see robots doing complex apartment deliveries at scale until building access, elevators, and secure handoff are solved. But there are plenty of routes where LEVA-like capability is a strong fit.
1) Campus logistics (hospitals, universities, industrial sites)
These environments have:
- repeatable internal routes
- mixed indoor/outdoor surfaces
- predictable container standards
- security and monitoring already in place
If you can move linen, meds, lab samples, maintenance parts, or sterile supplies with fewer manual touches, you reduce both labor and error.
2) Micro-fulfillment and store replenishment
Retail backrooms and micro-fulfillment nodes often struggle with short-distance “heavy awkward” moves. A robot that can:
- pick up a standard tote
- navigate tight aisles
- traverse ramps/thresholds
…can take on the repetitive moves that burn staff time.
3) Returns and recycling flows
Post-holiday season is a logistics stress test—especially in December. Returns spike, storage gets messy, and staff bounce between staging zones. A robot that autonomously relocates standard bins and boxes can keep flows from collapsing into piles.
That seasonal angle matters right now (mid-December): many operations leaders are already planning Q1 process changes based on what broke in peak.
The uncomfortable questions: theft, access, and trust
Answer first: The robot’s engineering is only half the deployment. Security and handoff design are the other half.
The public comments around systems like this are predictable—“theft potential,” “how does it buzz in,” “what about elevators?”—and they’re fair.
Here’s how teams making this practical typically address it:
- Secure cargo design: locked containers, tamper-evident latches, RFID/asset tracking
- Geofencing and supervised autonomy: the robot operates only in permitted zones; remote ops handles edge cases
- Access integration: deliveries to secure lockers, staffed desks, or controlled service entrances instead of front-door handoff
- Operational UX: clear signals to bystanders and staff; predictable behavior beats clever behavior
My stance: don’t force a robot to solve building access problems on its own. Change the process—use lockers, staging areas, and standardized handoff points. That’s how you get ROI without waiting for perfect autonomy.
If you’re evaluating AI-driven logistics robots, use this checklist
Answer first: Buy outcomes, not gaits. A robot that walks beautifully but needs constant babysitting won’t survive procurement.
Use these questions in pilots and vendor calls:
- What percentage of missions complete without human intervention? Ask for the number, not the story.
- How does it handle pickup and drop-off? If a person is required at both ends, treat it as assisted transport.
- What’s the exception workflow? Who gets alerted, how fast, and what can remote ops do?
- How does it transition between mobility modes? Rolling-to-walking is where stability and reliability show up.
- What are the container standards? Euro containers and standardized totes make autonomy realistic.
- What’s the uptime model? Battery runtime, charging time, and how many robots per route.
- What’s the safety envelope in mixed environments? Pedestrians, forklifts, and doors are the true test.
If you want a single north-star metric: cost per completed move (a “move” includes pickup + transport + drop-off).
What LEVA signals for AI in robotics & automation
LEVA is a prototype, and it’s still being refined. But it points at the direction that matters for this whole series: robots are graduating from guided vehicles to autonomous workers.
The near future of logistics automation won’t be dominated by humanoids trying to do everything. It’ll be specialized machines that do a few tasks extremely well—like moving standardized cargo through environments built for humans.
If you’re planning 2026 automation projects, consider where you can standardize containers, handoff points, and routes. That’s the fastest path to letting AI-driven robots walk, roll, and handle cargo with minimal drama.
Where could a robot like this remove the most manual touches in your operation—returns, internal transport, or last-50-meter delivery?