AI underwater robots are starting to haul heavy seafloor trash. See how autonomy, perception, and grippers turn cleanup into measurable automation.
AI Underwater Robots That Grab Seafloor Trash
A single storm can dump tons of debris into coastal waters—plastic packaging, lost fishing gear, scrap metal, even construction waste—then currents carry it out and gravity does the rest. It sinks. It spreads. And once it’s on the seabed, cleanup becomes slow, expensive, and dangerous.
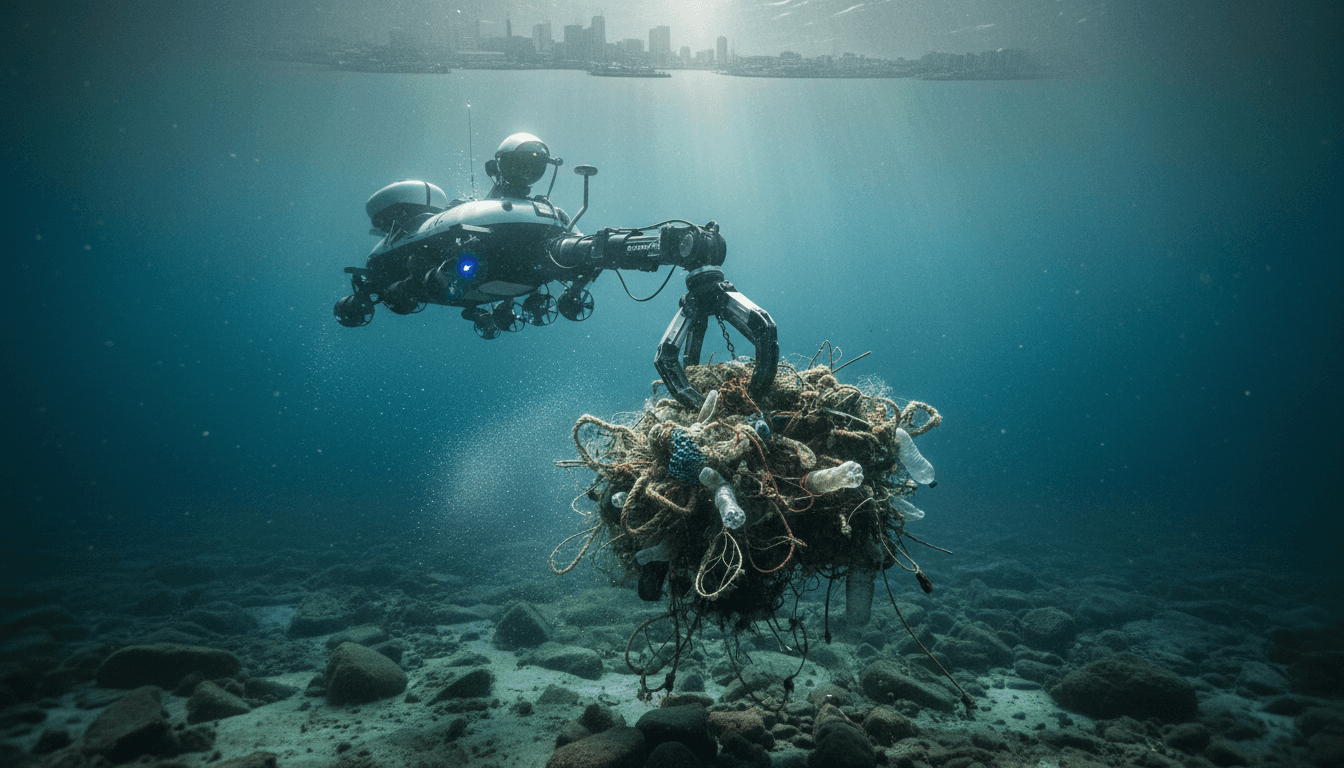
That’s why the recent work off Marseille—where an autonomous “gripper” robot has been hauling heavy trash from the seafloor—deserves attention beyond the “cool robot” factor. This is a real deployment in a harsh environment, doing a job that’s hard for divers and inefficient for conventional dredging. For anyone following our AI in Robotics & Automation series, it’s also a clear signal: autonomy isn’t just for warehouses and factories anymore. It’s moving into places where GPS doesn’t work, visibility is poor, and every decision costs battery.
What makes this interesting isn’t the claw. It’s the stack of AI-enabled capabilities around it: perception under water, safe manipulation of unknown objects, mission planning, and reliable operation without constant human babysitting.
Why seafloor trash is a robotics problem (not a volunteer problem)
Answer first: Seafloor waste removal needs robots because it’s a repeatable, high-risk logistics task performed in an environment that’s hostile to humans and traditional automation.
Beach cleanups are great, but they don’t touch what’s already sunk. Once debris is on the bottom, the usual options are:
- Divers, who face depth limits, safety risks, and limited time on-task.
- Trawling or dredging, which can disturb habitats and stir up sediment—bad for ecosystems and visibility.
- Remotely operated vehicles (ROVs), which work, but typically require skilled pilots and tether management (and pilots get tired).
The reality? Seafloor cleanup looks a lot like industrial retrieval and reverse logistics. Find objects scattered across a worksite. Identify what can be safely picked up. Plan grasping and transport. Avoid damaging surroundings. Repeat for hours.
That’s a robotics-friendly job—if you can solve for underwater constraints.
The underwater constraints that break “normal” autonomy
Underwater robotics is where easy assumptions go to die:
- No GPS below the surface. Navigation relies on inertial systems, acoustic positioning, and mapping.
- Low visibility from sediment, algae blooms, and wave action.
- Lighting variability and specular reflections off metal or wet plastic.
- Unstructured objects: tangled nets, half-buried tires, irregular scrap.
- Buoyancy and drag that change control dynamics.
- Battery limits that punish inefficient planning.
In other words, seafloor cleanup is a stress test for AI-powered robotics.
What an autonomous gripper robot actually needs to do
Answer first: A trash-hauling underwater robot is a system-of-systems: autonomy, perception, manipulation, and safety all have to work together.
The RSS summary describes an autonomous robot operating near Marseille with an oversized claw-like gripper. That claw is only the visible end-effector. The real value is the pipeline that turns “somewhere down there is a piece of waste” into “waste is secured and delivered to a collection point.”
Here’s the functional loop most underwater cleanup robots must execute:
- Search and detect debris across a target area
- Classify and prioritize what to pick up (and what to leave)
- Approach safely without stirring up a sediment cloud
- Choose a grasp strategy for irregular items
- Pick up and secure the object with minimal slippage
- Transport and drop-off to a basket, barge, or surface system
- Log evidence (location, type, estimated mass) for reporting
That loop maps cleanly to modern robotics building blocks.
Perception: seeing trash when the water fights back
Underwater perception is typically multi-sensor by necessity. Depending on cost and depth, teams combine:
- Cameras for close-range identification
- Sonar (imaging or multibeam) for longer-range detection and “seeing” through murk
- Depth sensors and inertial measurement for stabilization and state estimation
AI comes in when you need to detect “trash-like” shapes and materials under noisy conditions. Traditional computer vision can struggle with underwater color distortion and backscatter; modern approaches often use trained models that learn robust features for nets, cans, bottles, and mixed debris.
A practical stance: if your robot can’t maintain detection performance when visibility collapses, it’s not autonomous—it’s optimistic.
Manipulation: the gripper is the product
A claw-style gripper is a sensible choice for marine debris because it:
- Handles unknown geometry better than suction
- Can grab heavy, awkward objects
- Works even when objects are slimy, algae-covered, or partially buried
But autonomy in manipulation requires more than closing the claw. It needs:
- Grasp pose estimation: where to grab to minimize rotation and slippage
- Force/torque awareness: detecting when something’s stuck or too heavy
- Compliance: giving a bit so you don’t shatter brittle items or damage the seabed
- Recovery behaviors: re-grasping when the first attempt fails
Underwater, failed grasps cost more than time—they cost energy, and energy is mission length.
Navigation: turning retrieval into a repeatable route
Cleaning the seabed is a coverage problem. Robots must plan routes that maximize recovered mass per battery hour.
A typical autonomy stack includes:
- Simultaneous localization and mapping (SLAM) or related mapping methods
- Coverage path planning (like mowing a lawn, but in 3D with currents)
- Obstacle avoidance (rocks, reefs, wrecks)
- Station keeping so the robot can hold position while it grabs
This is where AI and automation meet business value: better planning means fewer re-scans, fewer wasted passes, and higher throughput.
Snippet-worthy take: In underwater cleanup, autonomy isn’t about replacing humans—it’s about keeping the robot productive when humans can’t see, can’t stay down long, or can’t afford to pilot every second.
The real business case: environmental cleanup as underwater logistics
Answer first: The fastest way to justify seafloor cleanup robots is to treat them like an automation program with measurable throughput, safety, and reporting outcomes.
A lot of sustainability tech fails because it can’t be operationalized. Robotics is different when it’s framed correctly: as a service that can be scheduled, measured, and improved.
Here’s how I’d model the ROI conversation for an AI underwater robot program:
1) Throughput metrics that matter
Instead of vague “we cleaned a lot,” track:
- kg recovered per mission hour
- objects recovered per battery cycle
- area scanned vs. area cleaned (these aren’t the same)
- intervention rate (how often a human must take over)
Those are the same kinds of metrics warehouses use for picking robots—just translated underwater.
2) Safety and liability reduction
Diving operations have real risk. An autonomous or semi-autonomous system can:
- Reduce exposure time for divers
- Handle heavy lifts more predictably
- Improve documentation for regulatory reporting
If a municipality or port authority is deciding between “send divers again” and “run the robot fleet,” reduced risk can be as valuable as recovered waste.
3) Data as a deliverable (not a byproduct)
A cleanup robot is also a mapping robot. That means you can generate:
- Debris heatmaps (where trash accumulates)
- Before/after evidence for stakeholders
- Object categories (plastic vs. metal vs. fishing gear)
That data supports upstream prevention: if most debris clusters near specific outfalls or anchorage areas, you can target policy and infrastructure.
Where the AI really lives: autonomy levels and human-in-the-loop control
Answer first: The most effective deployments combine autonomy for routine tasks with human oversight for edge cases—especially in regulated marine environments.
Fully autonomous underwater cleanup is a strong headline, but most real-world systems operate on a spectrum:
- Teleoperation (ROV-style): high control, high labor cost
- Supervised autonomy: robot handles navigation and grasping; operator approves actions
- Task autonomy: robot executes a mission plan; operator intervenes when alerted
For lead-generation-minded teams (integrators, robotics vendors, port operators), supervised autonomy is often the fastest path to real deployments. You get most of the productivity gains without betting everything on perfect perception.
“People also ask”: Why not just use magnets or nets?
Direct answer: Magnets only work on ferrous metal, and nets tend to snag, damage habitats, and can create more entanglement.
A gripper robot can discriminate—pick up what’s safe and leave what’s risky. That selectivity is the difference between cleanup and collateral damage.
“People also ask”: What’s the hardest object to remove?
Direct answer: Soft, flexible debris like fishing nets and ropes is usually harder than rigid trash.
Flexible objects deform, tangle, and drag. Removing them often needs special end-effectors, cutting tools, or staged handling (pin, lift, re-grasp). That’s a rich area for AI-driven manipulation research.
Lessons for automation teams (even if you don’t build underwater robots)
Answer first: Seafloor cleanup robots highlight three automation principles that apply to warehouses, factories, and field robotics.
1) Manipulation is the bottleneck
Mobile robots are common. Reliable picking of unknown objects is still hard.
If you’re building automation anywhere, put disproportionate attention on:
- Gripper design (mechanical advantage beats clever code)
- Sensing at the wrist (force, tactile, proximity)
- Recovery behaviors (failure handling is part of the product)
2) Autonomy needs a “boring” operating model
Successful robotics deployments win on operations:
- Clear mission plans
- Battery and maintenance routines
- Human escalation workflows
- Repeatable reporting
If the system can’t run on a schedule with predictable outputs, it won’t scale.
3) Sustainability use cases need measurable outcomes
If you want funding to stick, connect sustainability to operational KPIs:
- Mass recovered
- Area restored
- Safety incidents avoided
- Cost per kg removed
That’s how environmental robotics becomes a budget line, not a pilot project.
What to do next if you’re evaluating AI robotics for field work
Marseille’s seafloor cleanup robot is a strong reminder that AI robotics and automation are leaving controlled environments. The winning teams will be the ones who treat autonomy as an operations multiplier: better coverage, safer manipulation, and data you can defend.
If you’re a port authority, environmental contractor, or robotics leader exploring autonomous robots for environmental cleanup, start with a tight scoping exercise:
- Define the operating area (depth, visibility, currents, obstacles)
- Define “done” (kg removed, area cleared, object types)
- Decide the autonomy level (teleop vs supervised vs task autonomy)
- Require evidence (maps, logs, before/after)
The next wave in our AI in Robotics & Automation series will keep pushing on this theme: robots aren’t just optimizing internal processes—they’re becoming field operators.
What’s the next environment where you think autonomy will matter more than human labor—underwater, underground, or roadside?