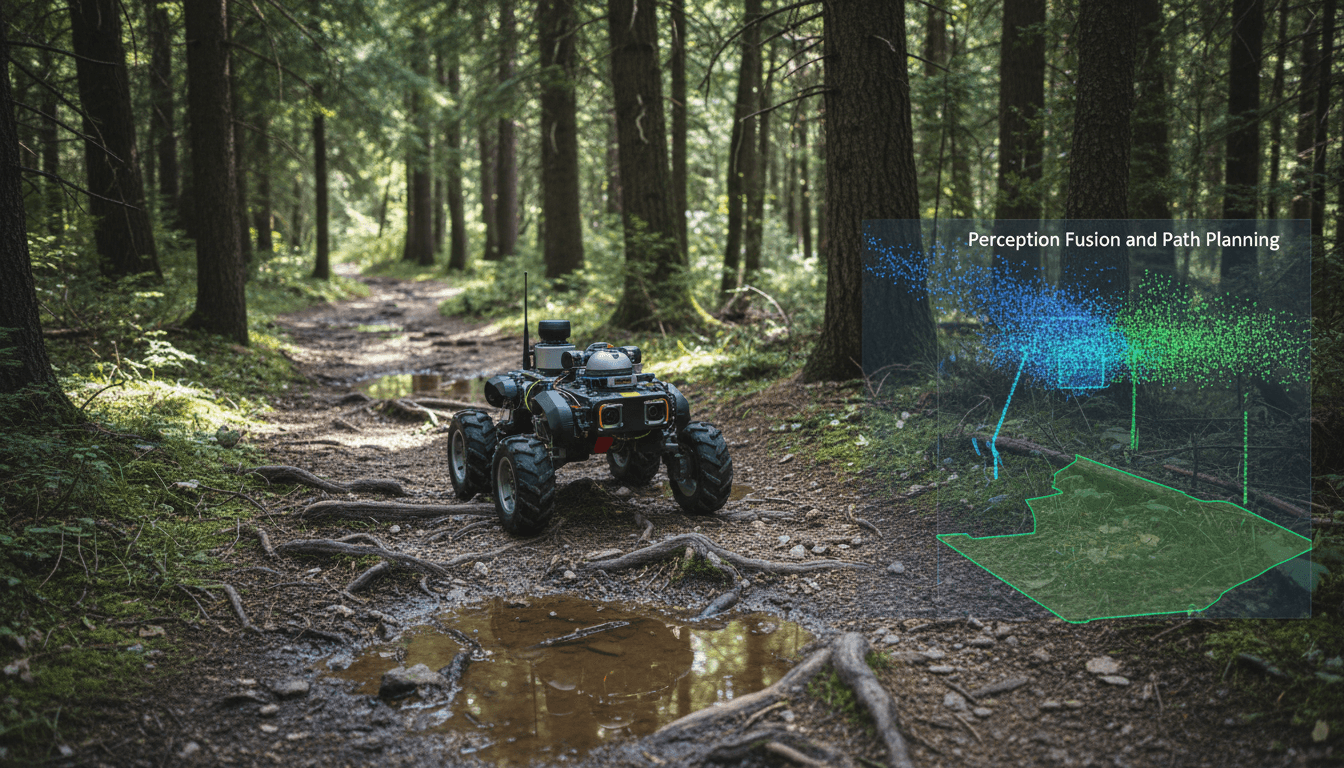
徒步小径机器人用“LiDAR几何+视觉语义”融合与滚动规划,在不确定地形中稳定导航。把这套思路映射到汽车自动驾驶,能看懂Tesla与中国车企路线差异。
越野机器人给自动驾驶上了一课:感知融合与路径博弈
山路比城市路更“诚实”。上周还能通行的小径,今天可能被倒木封死;雨后一脚下去,泥地的摩擦系数瞬间变脸;看起来“平整”的浅水坑,可能足以让轮式机器人打滑、陷车。2026-02-03 这个时间点回看自动驾驶行业的争论,会发现一个常被忽视的事实:真正考验自动驾驶 AI 的,不是路面有多标准,而是世界有多不稳定。
我很喜欢把这类户外机器人研究当作“放大镜”。因为在徒步小径上,几乎没有车道线、红绿灯或高精地图的保护伞;环境变化频繁、观测噪声更大、边界条件更极端。能在这种场景里跑通的“感知—决策—规划”链路,往往能反推我们该如何看待汽车自动驾驶的两条路径:Tesla 更偏“视觉+端到端”的 AI 叙事,以及中国车企更偏“多传感器融合+工程安全冗余”的落地策略。
本文来自“人工智能在机器人产业”系列,借助一项“机器人自主导航徒步小径”的研究,拆解三个更接地气的问题:为什么感知融合不是“堆料”,而是对不确定性的管理?为什么路径规划必须“边走边改”?以及这些经验如何映射到 Tesla 与中国车企的自动驾驶路线之争。
真实世界的核心难题:不确定性不是噪声,而是常态
直接答案:**户外小径导航的本质,是在观测不完整、地形不断变化的条件下,持续做“足够安全”的局部最优选择。**这和城市自动驾驶一模一样,只是城市把很多不确定性用规则、设施与数据“包了起来”。
研究者指出,徒步小径的难点不在“看见障碍物”这么简单,而在于障碍物与路况的组合会不断刷新:
- 维护不足导致的裸露树根、松石、坑洞、断面
- 风暴后形成的积水、泥泞、冲刷侵蚀
- 上坡、侧坡、台阶式高差等几何风险
- “看起来像路”的地面,实际承载力或摩擦完全不同(沙地 vs. 硬土、浅水坑 vs. 干地)
这类问题放到汽车上,就是:施工路段临时改道、井盖塌陷、路面反光积水、雨雪导致的车道线消失、阴影与眩光造成的视觉误判。不确定性并不会随着模型参数变大而消失,它只会以更刁钻的方式出现。
一个很硬的现实数据是:仅美国联邦土地上的步道就超过 193,500 英里(约 311,000 公里)。这种规模意味着“靠人巡检、靠经验驾驶”不可能覆盖全部场景,机器人与自动驾驶系统必须学会在复杂环境里自洽。
感知的两条腿:几何(LiDAR)+语义(视觉)为什么要一起用
直接答案:几何感知擅长“哪里不能去”,语义感知擅长“这是什么、该优先走哪儿”,把两者融合才能在复杂地形上稳定输出可用的可通行性地图。
这项研究的关键做法很朴素:用两种互补视角理解世界。
几何视角:LiDAR 负责坡度、台阶和大障碍
LiDAR 的优势在于测距与形状:斜坡角度、地面起伏、落差、巨石、树干这类“几何上明显不安全”的风险,它看得很稳。对应到汽车,就是对立体障碍物、路缘、护栏、车辆外形的高置信识别。
但几何也有盲区:
- 小障碍(细小树根、碎石堆)可能在分辨率或稀疏点云下被弱化
- 几何相近但物理属性不同的地面(硬土 vs. 松沙、浅水 vs. 干地)在点云上很像,但通过性差异巨大
语义视角:相机负责“识别这是不是路、是不是坑、是不是草地”
研究团队构建了徒步小径数据集,把图像标注为 8 类地形(例如:小径、草地、岩石、树干、树根、坑洞等),训练语义分割模型。模型在识别“既有小径”方面表现突出——这点很关键:很多时候,系统真正需要的是“偏好”,而不是“绝对正确”。
但语义也不可靠:光照变化、阴影、逆光、雾气、树叶遮挡都会让纯视觉系统波动。你在城市里看到的“夜间雨天识别难”,在林地里只会更夸张。
融合的落点:可通行性地图(Traversability Map)
他们把语义标签通过深度投影到 3D,再与 LiDAR 的几何可通行性分析融合,最终形成一个统一的可通行性地图:空间中的每个点都有一个“通过代价/风险成本”,并且对“小径”赋予更低成本(更优先)。
这件事映射到车企路线之争时,就特别清楚了:
- 多传感器融合路线(更像中国车企主流):希望用 LiDAR、毫米波雷达、摄像头各取所长,提升在雨雪、夜间、逆光等“视觉脆弱时刻”的稳定性。
- 偏视觉/AI-only 路线(更像 Tesla 的叙事):希望通过大规模数据与模型能力,提升对语义世界的理解,把“看懂”当成第一性。
我的看法更直白:**在不确定性更高的环境里,感知融合不是堆配置,而是把风险来源拆开管理。**你不可能要求单一传感器在所有条件下都稳定,就像你不会只靠一张地图去徒步穿越不断变化的山路。
规划不是一次性算完:为什么要“边走边重算”
直接答案:在动态、未知、可通行性不断变化的环境里,最靠谱的规划方式是分层规划+滚动重规划(receding horizon)。
研究采用层级规划:
- 全局层:不试图一次性规划到终点,而是滚动式地不断生成中间航点。
- 算法层:定制
RRT*,让搜索更偏向可通行性概率更高的区域,并把可通行性数值当作代价函数。 - 局部层:在航点之间用预计算的弧线轨迹实现运动,并结合可通行性与地形分析进行避障。
这个设计带来一种很“像人”的驾驶风格:优先走小径,但不固执。
- 前方小径被巨石挡住?系统允许短暂绕到草地等安全区域
- 绕过危险后再回到小径?系统会主动“重归正道”
把它换成城市语境,就是:临时施工导致车道不可用时,合理借道/绕行;绕过事故点后,回到原本更安全、更高效率的路线。
这里有个值得车企反复咀嚼的点:**“遵守规则/车道”与“确保安全”并不是永远一致。**真正成熟的自动驾驶系统,会把“规则偏好”写进代价函数,而不是写成硬约束。
从徒步小径到城市道路:Tesla 与中国车企的路径差异怎么看
直接答案:两条路线都在追求同一个目标——可扩展的安全,但它们对“如何对抗不确定性”的答案不同:Tesla 更依赖数据与模型的语义理解,中国车企更依赖多源传感器与工程冗余。
相同点:都在做“可通行性成本”的最优化
不论是小径还是城市路,系统最终都要把世界压缩成可计算的形式:哪里风险低、哪里风险高、怎么走最划算。研究里的 traversability map,本质上就是自动驾驶里的“可行驶区域+风险代价图”。
差异点 1:感知冗余 vs. 模型归一
- 在林地场景里,纯视觉受光照影响很大;纯几何又难以区分“看似平整但会陷车”的地面。
- 因此融合是自然选择:用 LiDAR 保底几何安全,用语义分割识别“路”和“非路”。
城市自动驾驶同理:当你必须在夜雨、逆光、隧道口、雾霾等场景里保持稳定输出,多传感器更像是在买“下限”;而纯视觉/端到端路线更像是在赌“上限”。
差异点 2:重规划频率与策略
研究强调滚动重规划,因为环境变化太快、地图不可靠。汽车自动驾驶在中国城市里同样需要高频重规划:外卖电动车突然横穿、路口临停、潮汐车道、临时围挡。越是“人味儿重”的交通系统,越像徒步小径。
差异点 3:工程化目标不同
这项研究还提到“尽量不离开小径”,因为越野会破坏植被、加剧侵蚀、干扰野生动物。对应到车的世界,就是合规、礼让、对弱势交通参与者的保护。很多时候,系统不是“能走就行”,而是要在社会规则里行驶。
如果把这句话写成行业共识,我会这样说:
自动驾驶不是在找一条能走的路,而是在找一条对所有人都更可接受的路。
给研发与产品的三条可落地建议(也适用于机器人团队)
直接答案:想把自动驾驶/移动机器人做稳,优先抓三件事:不确定性建模、可通行性代价设计、数据覆盖季节与极端光照。
-
把“偏好”写进代价函数,而不是写死规则
- 研究用“偏好小径”的低代价实现“更像人”的行为。
- 车端同理:对车道保持、对行人让行、对非机动车保持距离,应该是可调的成本项,而不是一条条 if-else。
-
针对失败场景做传感器互补测试
- 给相机制造最难条件:逆光林荫、夜间强反光、雨雪泥点遮挡。
- 同时验证几何传感器对小目标、软障碍的误差模式。
- 目标不是证明“我都能行”,而是明确“我什么时候不行”,并设计降级策略。
-
数据集要跨季节、跨地形、跨城市风格
- 研究下一步就提到扩展到不同季节与步道类型。
- 对汽车来说,季节变化等同于域迁移:冬季反光雪地、南方雨雾、北方风沙、沿海强盐雾。
- 真正有效的数据策略不是“更多”,而是“覆盖转折点”:最容易翻车的那 5% 情况。
结尾:更复杂的路面,往往带来更清晰的答案
徒步小径导航的价值,不在于未来会有多少“山地送货机器人”,而在于它逼着我们正视自动驾驶的本质:系统必须在不确定性里持续做决定,并对失败留出余地。
从这项研究可以得到一个非常汽车行业的启发:当环境开始“像山路一样变化无常”,你就会更愿意接受多源感知融合、更愿意采用滚动重规划、更愿意把规则当成成本而非枷锁。它也解释了为什么 Tesla 与中国车企会走出不同路径:不是谁更“先进”,而是谁更适配自己要面对的道路与监管现实。
接下来更值得讨论的是:当城市道路越来越像“半结构化的徒步小径”(施工常态化、混行更密集、天气更极端),自动驾驶 AI 的答案会不会也越来越像这台 Husky 机器人——能识别路、偏好走路,但关键时刻敢绕开风险,并且随时重新规划?